下载PDF
应变波齿轮扭矩传感器
应用概述
易变形和适应性强的机器人通过自动化和全天候执行重复任务,具有提高制造生产率的优势。机器人手臂通常被设计成可训练的,或者作为协作机器人作为一个团队进行操作。通常,伺服或步进电机是这些臂的驱动装置。
然而,为了提高机器人的性能,工程师可以利用应变波传动装置(也称为谐波应变波齿轮箱),这种装置以降低机器人手臂的惯性和通过更快的加速度和更快的稳定时间来提高动态性能而闻名。应变波传动装置在单级中提供高减速比和非常低的齿隙,使这些驱动器适用于高精度应用,如外科机器人。谐波应变波齿轮还可以增加有效载荷容量并降低功率要求。
除了监控角度位置之外,监控驱动扭矩输出以确保机械臂平稳运动也是至关重要的。在要求高精度扭矩测量的现代机器人应用中,应变波齿轮扭矩传感器是一个关键元件。 FUTEK的应变波齿轮扭矩传感器支持低功耗、轻重量、低外形和高精度的运动控制,以形成闭环反馈,并在几何形状和设计上具有高度灵活性。
然而,为了提高机器人的性能,工程师可以利用应变波传动装置(也称为谐波应变波齿轮箱),这种装置以降低机器人手臂的惯性和通过更快的加速度和更快的稳定时间来提高动态性能而闻名。应变波传动装置在单级中提供高减速比和非常低的齿隙,使这些驱动器适用于高精度应用,如外科机器人。谐波应变波齿轮还可以增加有效载荷容量并降低功率要求。
除了监控角度位置之外,监控驱动扭矩输出以确保机械臂平稳运动也是至关重要的。在要求高精度扭矩测量的现代机器人应用中,应变波齿轮扭矩传感器是一个关键元件。 FUTEK的应变波齿轮扭矩传感器支持低功耗、轻重量、低外形和高精度的运动控制,以形成闭环反馈,并在几何形状和设计上具有高度灵活性。
使用产品
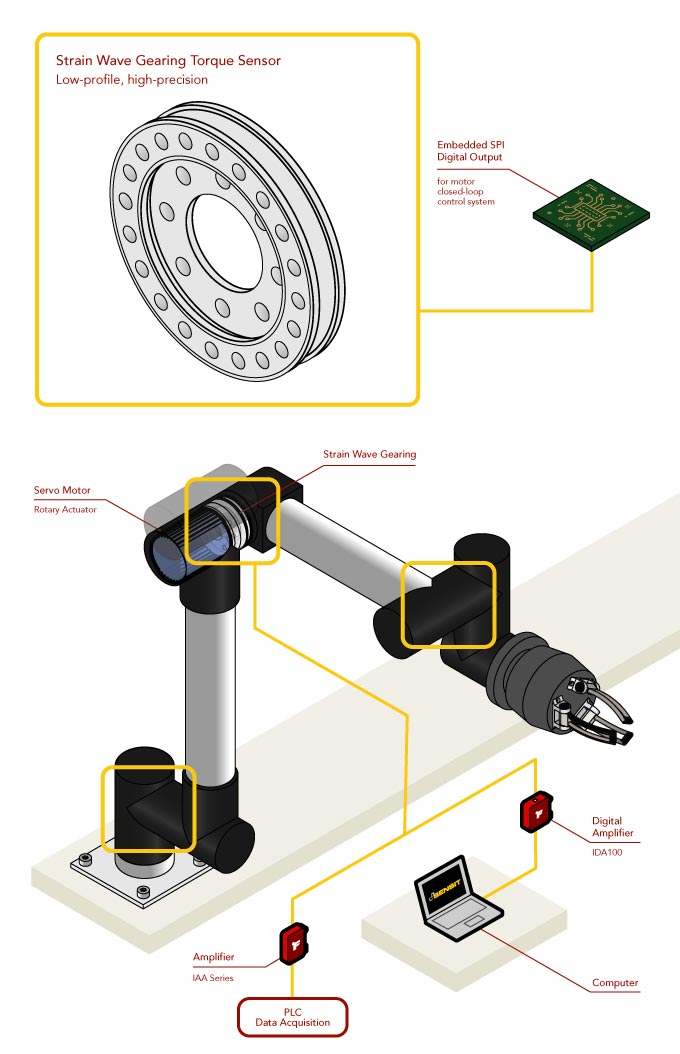
轻质、低轮廓、高精度应变波齿轮扭矩传感器,与IAA系列、IDA100模拟放大器或QIA125多通道SPI数字输出配对。
使用说明:
|
* 应变波齿轮扭矩传感器安装在机械臂应变波齿轮箱及其安装点之间。
* 扭矩传感器测量手臂运动期间输出的扭矩,然后由IAA系列、IDA100放大器或QIA125多通道SPI数字输出放大。
* 放大的信号然后被发送到可编程逻辑控制器或机械臂控制器,提供高精度的扭矩反馈,形成闭环控制系统。
* 此外,使用IDA100,可以监控传感器的放大输出,并使用FUTEK的SENSIT软件以数字方式调整模拟放大器设置。
|
|
||||||||

